新任の先生のご紹介-山口皓平准教授(機械システム制御工学研究室)
2024年11月1日付けで,機械システム制御工学研究室の准教授として,山口皓平先生がご着任になられました.山口先生のご研究内容を紹介する記事をご寄稿いただきましたので,以下に掲載させて頂きます(機械工学科・広報WG)。
ーーー
11月1日着任の山口といいます.近年,複雑な機械システムが数多く登場し,私たちの生活に溶け込みつつあります.私は,このようなシステムを「どのような形」に,「どのような方法で制御」すれば良いのかという点に着目した研究を進めていきたいと考えています.また,航空機や宇宙機も研究対象としており,惑星間空間における軌道設計,地球,太陽,小惑星のような3体問題における軌道ダイナミクスなども研究しています.
1.システムの形状とコントローラを同時に最適化する試み
システムの形状とコントローラを独立に設計するのではなく,その要素を混ぜて一つの指標で評価する試みを行っています.例えば,「吸引領域」と呼ばれる原点周りの安定領域の大きさを広げることで(図1),対象の最適化を行おうとしています.吸引領域の形はシステムの幾何的な形とコントローラの設計の両者で変化するので,その両方を同時に調整することで,領域の大きさを広げることができます.
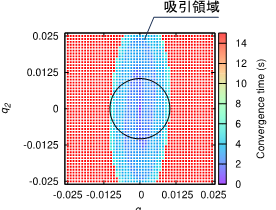
図1:とあるシステムの吸引領域を可視化した図
例えばドローン(マルチロータ機)の吸引領域を大きくすることで,風などによる姿勢の乱れに強い機体を設計することができます(図2).
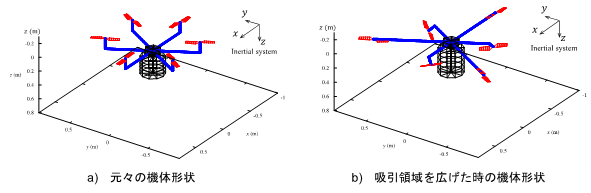
図2:ドローン(マルチロータ機)の形状・コントローラを同時に最適化した例(図をクリックすると拡大表示されます)
2.宇宙探査機や小惑星の軌道に関する研究
地球に接近する軌道を持つ小惑星が,実はこれまでに3万6千個以上発見されています.そのような小惑星は,地球衝突を起こすリスクを持つと同時に資源として有用な可能性を秘めています.このような小惑星に対して宇宙探査機を送り込んで衝突させ,軌道を変えることで地球から遠ざけたり,または地球の重力に長時間拘束されるような軌道に投入する技術を開発しています.
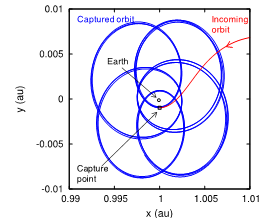
図3:地球に接近する小惑星を重力トラップする軌道
最近の記事一覧
- 2025.03.27
- 白石准教授(カーボンニュートラル燃料工学)が第17回岩木賞を受賞しました
- 2025.03.24
- 高橋菜月さん(エンジンシステム研)が自動車技術会大学院研究奨励賞を受賞
- 2025.03.24
- 矢野伶さん(カーボンニュートラル研)・牧野寛司さん(エンジンシステム研)が創成科学研究科(工学)研究奨励賞を受賞
- 2025.03.22
- 令和6年度機械工学系専攻・機械工学科 学位記授与式(卒業式)が挙行されました
- 2024.12.10
- 新任の先生のご紹介-山口皓平准教授(機械システム制御工学研究室)
- 2024.09.20
- エンジンシステム工学研究室の2名の学生が,日本マイクログラビティ応用学会において表彰されました
- 2024.08.08
- 中高生向けサイエンス誌『someone』において坂野文菜講師が紹介されました
- 2024.08.08
- 8/10(土)オープンキャンパスを開催します。
- 2024.05.27
- 新任の先生のご紹介-上道茜先生(機械エネルギー制御工学研究室)
- 2024.05.20
- 新任の先生のご紹介-毛澤兵先生(バイオマテリアル研究室)